




電(diàn)動缸驅動控制三自由度試驗台
在新(xīn)型飛行器研制過程中(zhōng),飛行仿真實驗是必不可(kě)少的重要步驟,飛行仿真實驗主要分(fēn)為(wèi)測試飛機飛行動力學(xué)性能(néng)的風洞試驗和測試飛機動态控制性能(néng)以及各種機載傳感器性能(néng)的地面半實物(wù)飛行仿真實驗。隻有(yǒu)通過仿真實驗,獲取足夠多(duō)的飛行器性能(néng)數據,确保飛行器的外形設計符合動力學(xué)要求,控制系統具(jù)有(yǒu)足夠的穩定性以及各種機載儀器能(néng)夠在模拟工(gōng)作(zuò)環境中(zhōng)正常工(gōng)作(zuò),才能(néng)進行飛行器的試飛工(gōng)作(zuò)[。高性能(néng)三自由度試驗台作(zuò)為(wèi)飛行動力學(xué)性能(néng)風洞試驗系統的一個重要設備,可(kě)以真實模拟空中(zhōng)升降、俯仰、滾轉三自由度運動姿态,對新(xīn)型飛行器的研發起到關鍵作(zuò)用(yòng)。
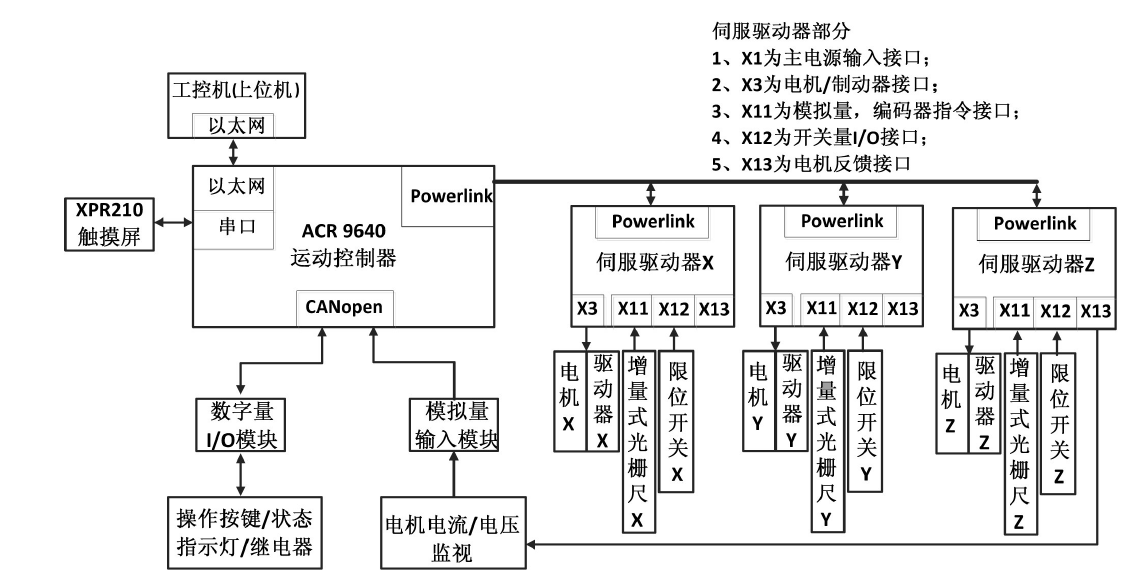
試驗台控制系統主要由3支電(diàn)動缸、電(diàn)控系統及測控系統軟件等部分(fēn)組成。3支電(diàn)動缸與試驗台鉸接連接,控制系統控制3支電(diàn)動缸位移變化,改變升降機旋翼的操縱角,從而獲得飛行仿真試驗要求的各項參數閉環運動系統是以安(ān)裝(zhuāng)在電(diàn)動缸上的光栅尺作(zuò)為(wèi)反饋裝(zhuāng)置,控制器根據實際位置對發送脈沖的速度進行調節,電(diàn)動缸閉環控制方式能(néng)夠補償步進電(diàn)機在運行中(zhōng)由于失步以及整機機械結構引起的偏差。運動控制器最初是以啓動頻率發送脈沖,通過驅動器的環形分(fēn)配器和功率放大後以繞組電(diàn)流的形式使步進電(diàn)機開始轉動,通過聯軸器和絲杠帶動電(diàn)動缸平移。光栅尺将電(diàn)動缸直線(xiàn)位置信息反饋給工(gōng)控機,工(gōng)控機再将運動指令發送給控制器。本控制策略優點是可(kě)以對整個運動系統中(zhōng)出現的誤差進行補償,使電(diàn)動缸準确定位。針對三自由度試驗台控制要求,明确系統控制策略,構建了“PC+運動控制器”控制電(diàn)動缸的總體(tǐ)方案。該方案已用(yòng)于風洞試驗系統中(zhōng),有(yǒu)效解決了液壓缸可(kě)靠性差、抗污染能(néng)力弱、故障率高及控制複雜等問題,很(hěn)大程度提高了系統的安(ān)全性、穩定性及抗幹擾能(néng)力。